前言
家人们,我现在真的有点相似了。
你说得对,但是IIC是飞利浦自主研发的一款通信协议,目前被大量工控硬件广泛采用。
正因为其应用之广泛,我们板子上的那块IIC寄存器,并不包含在Keysking教程之内。我们必须自己通过板子自带的教程研究出来寄存器的使用方法。
然后一研究就用了两天。
板子自带的教程是用软件控制GPIO口的电平变化,从而模拟了IIC通信的实现。据说这是因为ST公司的硬件IIC实现有缺陷。但是据Keysking所述,此缺陷伴随着软件更新已经被修复得差强人意。而且有还不用不是很蠢吗?所以我最后还是决定用硬件实现IIC通信。以下就是我们这次的“探险”过程。
IIC通信的原理
说到通信,我们肯定会想到之前学到的串口通信。串口通信的原理是这样的:
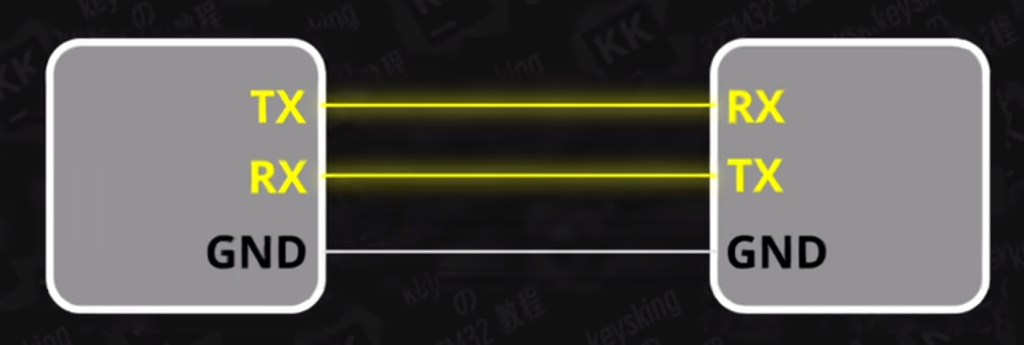
串口通信
数据来往走两条车道,可以同时双向进行。我们将其称为“全双工”通信。
IIC通信的原理与串口不同,它只有一条信道可以传输数据。正因如此它采用了主-从模式,即由主机发送信号,收到从机的应答后再继续进行下一步操作。我们称其为“半双工”通信。
容易发现,在上述的应答过程中,可以存在多个从机和主机的通信,也就是说一个IIC通道可以连接很多个IIC硬件(想想USB)。我们把这种支持多设备连接的协议称为总线协议。
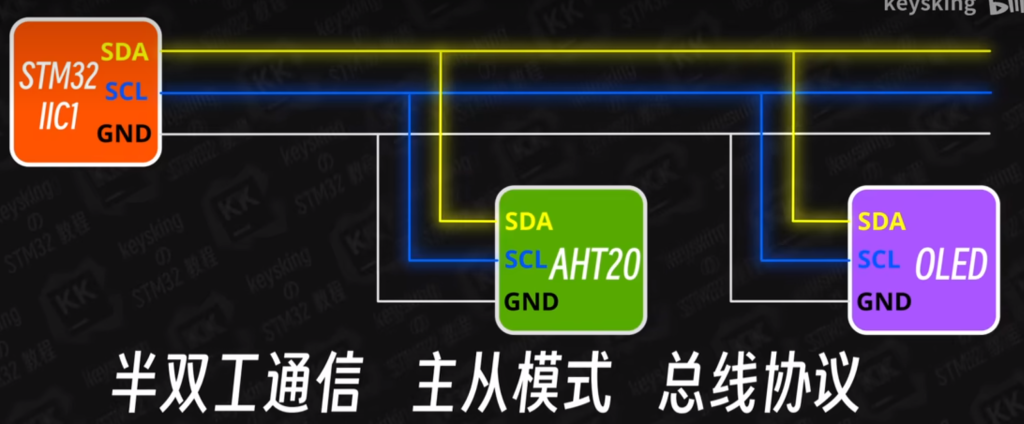
IIC通信
IIC另一个与串口不同的点在于,串口是异步通信,而IIC是同步通信。
我们都知道,在数据传输的过程中,存在“发送”和“读取”两个指令。对于异步通信来说,数据发送读取操作时机由两设备各自的时钟决定;而同步通信的发送读取操作时机依靠SCL通道上发出的时钟脉冲确定。
这又是怎么做到的呢?
简单来说,SCL会按照一定频率发送高低电平信号。接着主从机按照下面的顺序执行通信:
SCL低电平:主机修改SDA的值(0或1);
SCL高电平:从机读取SDA的值。
如此循环就可以完成一轮通信。
还有些比较复杂的原理,可以参考下面的视频。
IIC通信的实现
在我们的开发板上,有一块EEPROM。它是一种早期开发的特殊的闪存,目前多被用于烧录主板的BIOS。查看开发手册可以看到其与STM32的连接方式为IIC通信。
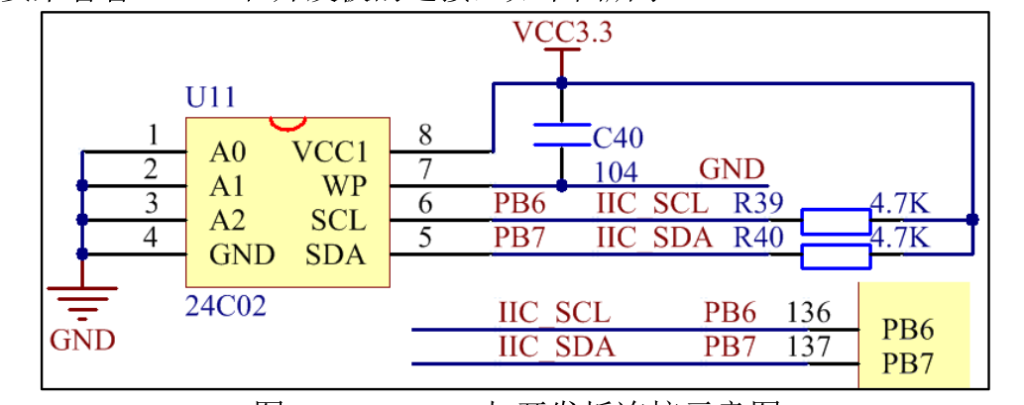
因为PB6、7引脚也是GPIO引脚,我们可以使用软件模拟的方式来实现IIC通信。不过HAL库函数已经为我们准备好了IIC通信的相关代码,我们这里就采用HAL库来直接实现IIC通信吧。
首先新建工程,并且在ioc文件中进行相应的调整。
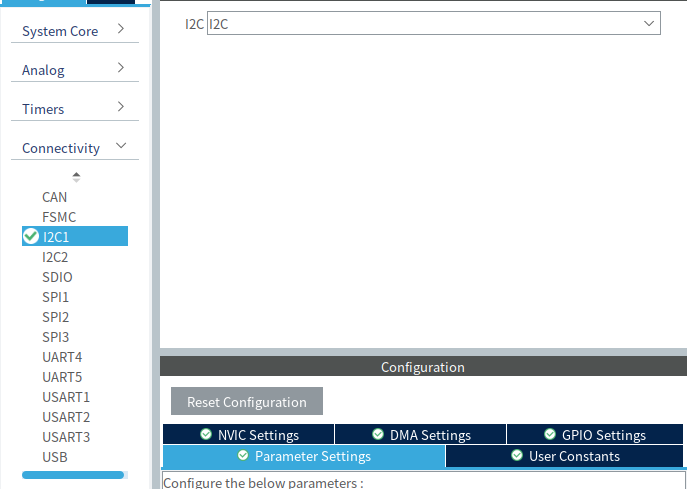
打开IIC通信
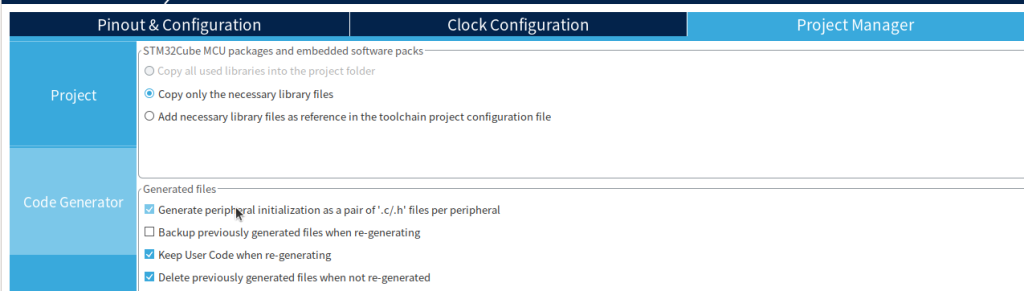
勾选上“为每个驱动生成相应的.c/.h文件对”
由于我们要通过串口得知数据是否写入成功,因此我们也打开USART1。
保存生成代码之后可以发现,在Src和Inc文件夹中多出了各个设备对应的驱动文件。
我们也来为我们的EEPROM新建驱动文件,就叫24c02.h/24c02.c吧。
下面是我们创建一个驱动链的过程:
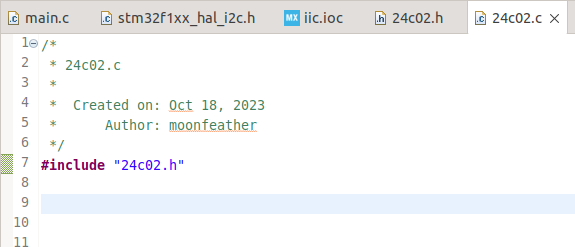
在24c02.c中包含24c02.h
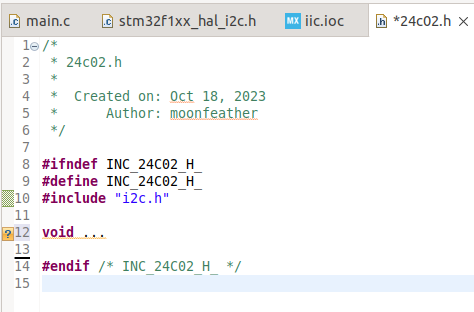
在24c02.h中包含i2c.h
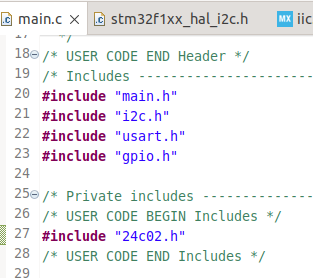
在main.c中包含24c02.h
要想在这块EEPROM上实现IIC通信,我们首先要了解其对应的标准通信方法。查阅资料如下:
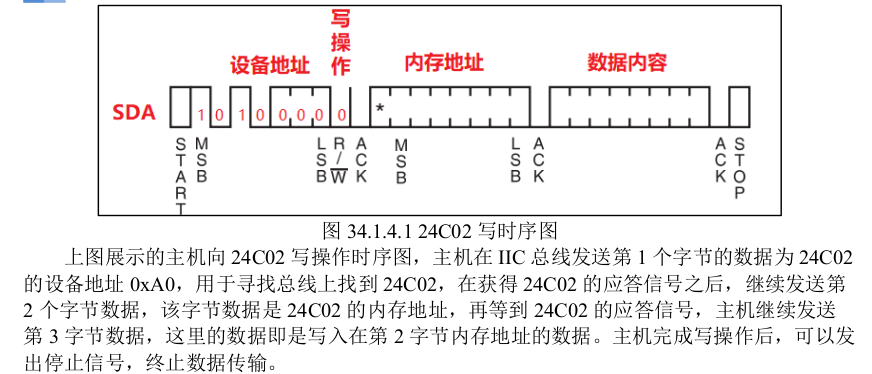
简单来说,主设备每次发送信息之后都需要得到从机的ACK信号,也就是说,我们得不断先发送、再接收、发送、接收……
这也太麻烦了吧??
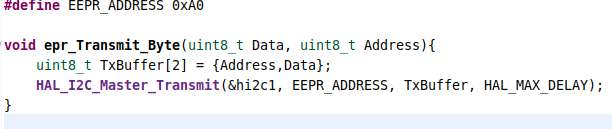
你说得对,所以HAL库帮我们简化了这个流程。不难发现,在上述的过程中,从机的所有回复都是ACK,就连终止信号也是主机发出。从机在这个过程中处于一个“啊对对对”的状态,我们其实并不必费力对其回复做出判断,只需要专注需要发送的内容即可。使用这个HAL库函数:

第一个参数是iic接口定义的地址;第二个参数是写从机的地址;第三个参数是要发送的数据的地址;第四个参数是写的发送数据的长度;第五个参数是超时时间。
怎么样,和串口通信的Transmit函数是不是很像?
就这张图的而言,运行这个函数会自动帮我们处理两次从机的ACK应答,并且自动完成传输的操作。实际上,这个函数还有返回值,类型为HAL_StatusTypeDef。简单说,如果返回值是其类型之一的"HAL_OK",就代表本次操作顺利完成。如果是"HAL_ERROR"或者"HAL_BUSY",就说明本次操作失败,我们可以用switch-case对其进行对应的错误处理。
接下来,我们不妨更进一步完善我们EEPROM的传入函数。

为了方便调试引入返回值
这样一来我们就一次性传输了所写入的地址和写入的数据。
在主函数中,我们可以用for循环来对EEPROM写入对应的数据:

不过我们现在只是“如写”——只通过调用HAL库向一个地址写入了数据,我们并不知道该数据有没有被放到我们想要的地方。那么接下来,我们不妨用HAL的IIC读取函数将刚才写入的数据读取到另一个数组中吧。
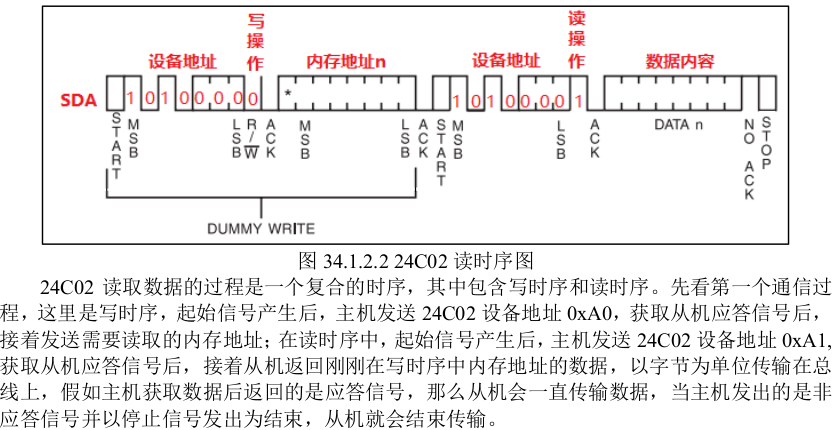
首先我们来看看这块EEPROM的读取通信。
HAL库中的IIC读取函数如下:

这和Transmit函数类似
于是,我们可以分析出应该先进行I2CTransmit函数,向设备写入读取的内存地址,然后进行I2CReceive函数读取变量。构建的函数如下:
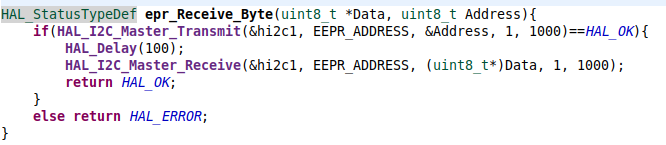
为了方便调试引入返回值
回到main.c中,利用这两个函数进行一系列操作。
| |
刷板运行看看效果!
完美实现了预期目标!