通过前面几章的学习,我们现在可以编写代码和程序,将其编译到学习板上并运行。
ST-Link确实是一种方便的调试接口。然而实际应用中,我们肯定需要比这更快速且更方便的方法来和STM32通信。
设想有这样一个需求:红灯每隔1秒翻转亮灭,STM32从外界接收指令。若收到1则绿色小灯亮起,0则熄灭。
我们先来通过串口通信实现接受指令并控制小灯亮灭。
一、初识串口
查询开发板原理图,可以找到我们开发板上的串口。
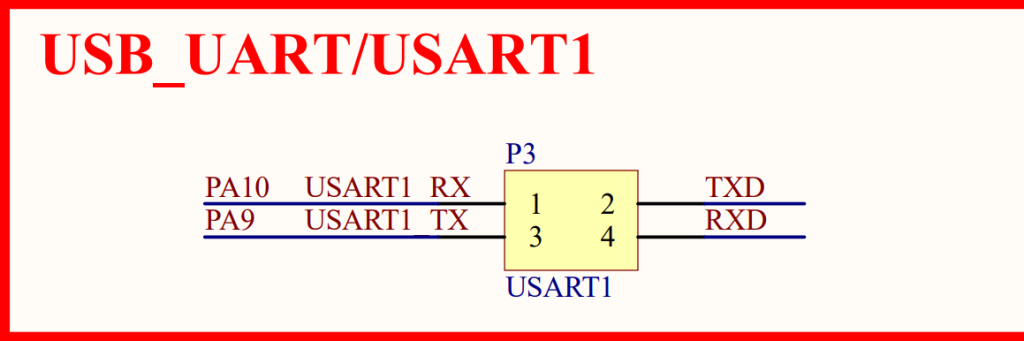
自带USB转换
在这幅图中有一些待解释的关键名词。
首先,RX代表接收端(Receive),TX代表发送端(Transmit)。两设备分别对应的发送和接收端是相反的。
其次,USART代表了"Universal Synchronous/Asynchronous Receiver/Transmitter"(通用同步/异步接收/发送器)。USART有许多标准,比如RS-232、RS-485、TTL(使用COM接口),通用串行总线(使用USB接口)。在我们板子上的这一部分是使用TTL标准的。

板子上的串口
啊?可是这是Type-C的接口啊?
你说得对,但是这是因为开发商为了方便我们使用,所以直接将TTL的四针转出了USB。我们只需要将电脑与这个USB口相连,就可以在电脑上收发数据了。

TTL信号一般都走这种COM串口,你猜厂商为什么没给你做这样的口?
传输数据的过程中,两设备在TX-RX上按照约定好的频率发送-接受高低电平(1/0),就可以完成数据的发送和接收。
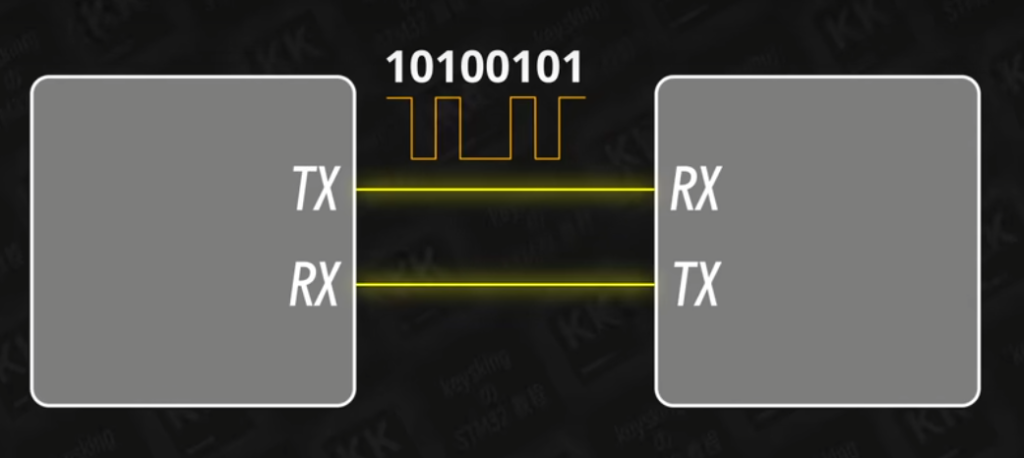
有时,两设备之间也会连接一根地线,这是为了方便规定零电势,避免可能产生的高低电平识别障碍。

二、串口轮询模式
进入STM32CubeIDE的ioc文件,选择选项卡中的Connectivity,找到USART1并将其开启。
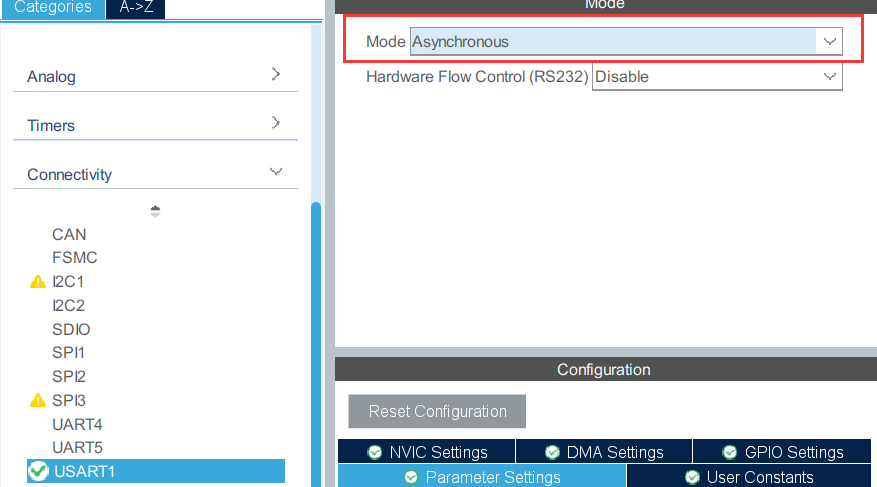
将模式调为异步(Asynchronous)
在下方可以调整一些基本的参数。
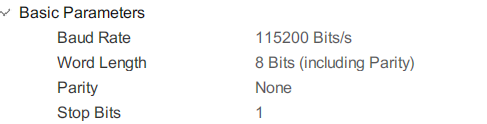 Baud Rate(波特率)指的是每秒发送的字节数。对于TTL协议来说,每次发送的内容都是1Byte(8bit),即一字节,加上开头的0和结束的1共10bit。也就是说115200 Bits/s的波特率对应下来就是11520 Byte/s,即11.52 KB/s。两设备必须使用相同的波特率才能正常通信。这也是异步通信的特点之一。
Baud Rate(波特率)指的是每秒发送的字节数。对于TTL协议来说,每次发送的内容都是1Byte(8bit),即一字节,加上开头的0和结束的1共10bit。也就是说115200 Bits/s的波特率对应下来就是11520 Byte/s,即11.52 KB/s。两设备必须使用相同的波特率才能正常通信。这也是异步通信的特点之一。
下面分别是字节长度、校验位、停止位,保持默认即可。
按下Ctrl+S生成代码,可以发现IDE帮我们生成了USART的初始化函数。
那么接下来就让我们试着让STM32向我们每秒发送一次信息吧!
1、发送
首先在自定义变量区定义一个用来储存发送内容的数组。

PV→Private Variable
为什么用uint8_t数据类型?因为这种类型可以存放多种内容,且长度均为8字节。
我们接下来使用的函数也将这种变量作为形参。

别忘了在开头引用string.h库
第一个参数所使用的指针(代表使用的接口)已经在程序开头被自动定义。最后一个参数代表是等待时间。HAL_MAX_DELAY是其最大值。

刷板完成后,我们用USB数据线连接UART接口到电脑USB-A口上,再到串口调试软件处接收数据。这边我们使用了Bilibili UP主 Keysking开发的串口助手。(https://serial.keysking.com/)
这下我们就成功实现了STM32向电脑传输信息的功能。
2、接收
像刚才一样,定义一个用于接收信息的数组。
用于接收的函数和发送的函数相似,如图所示:

一直等待输入,读取到输入之后就输出读取到的输入值
刷板运行,效果如图:
通过这个视频,我们也可以看出,超过传输长度的数据会被堵塞在通道中,一直到下一次才会被读取。在这个过程中,实际上CPU一直密切监督着寄存器进行数据的发送和储存,不会进行其它的工作。我们把这种串口的通信方式称为“轮询”。
回到我们一开始的需求:若收到1则绿色小灯亮起,0则熄灭。那么我们需要根据收到的内容来控制小灯的亮灭。我们可以写如下代码:
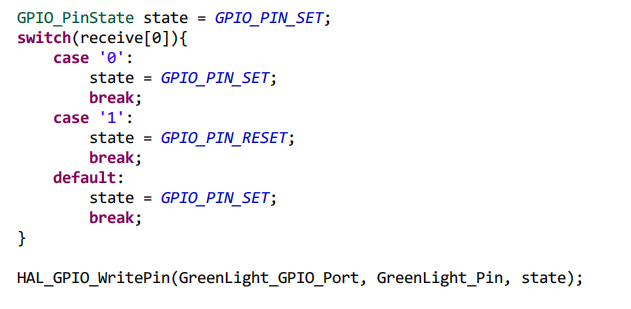
这里我们使用了GPIO_PinState类型来初始化state,这样我们就可以把state作为WritePin函数的形参来传递了。
刷板运行如下:
成功运行!
二、串口中断模式
如果我们想让红灯在串口读取信息的过程中不断闪烁,又该怎么办呢?
我们必然不可能直接在while循环中加上控制红灯闪烁的代码——因为我们的CPU被串口通信的任务占用,没有办法不停地执行红灯闪烁。
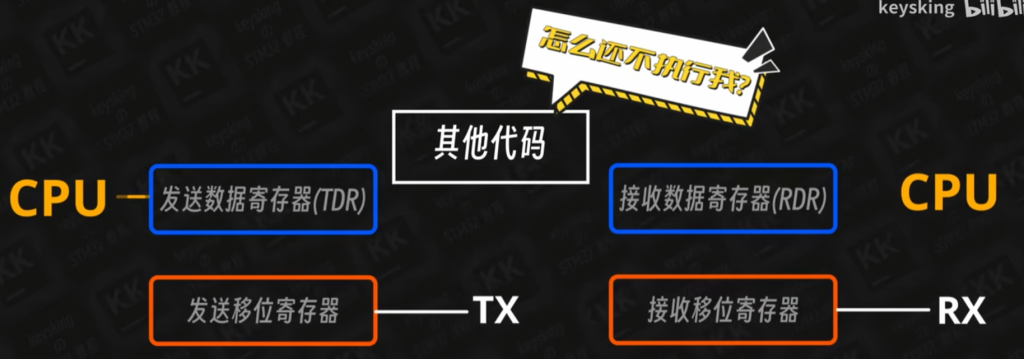
一般称这种状态为“堵塞”
——上面这段话有没有让你想起什么?没错,我们又要使用中断来解决这一问题。
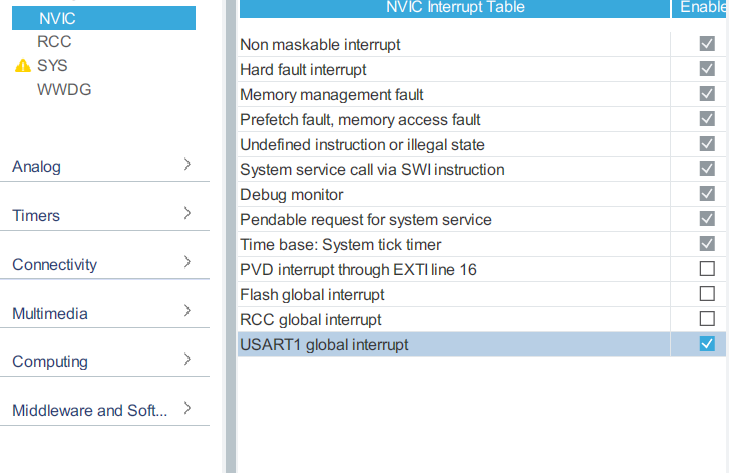
进入ioc文件,在NVIC栏勾选上UART1,使其可以触发中断。
串口的中断输入输出函数只需要在之前的函数名后加上_IT后缀即可。
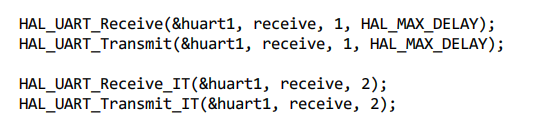
区别是没有等待时间,因为中断模式不阻塞CPU
有了这个函数,我们可以大致构建出一个程序的模型:
在程序开始就接收数据;
接收到数据之后触发中断,在中断函数内部执行绿灯亮灭操作;
while循环内控制红灯亮灭。
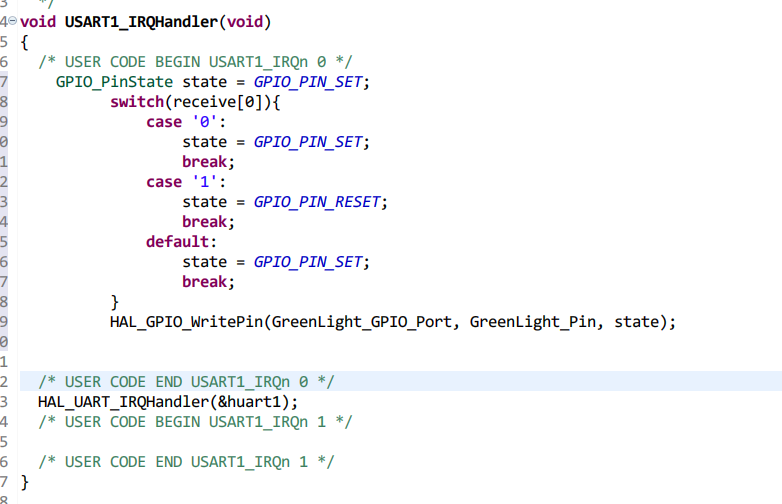
中断函数内部
很合理的逻辑,不是吗?然而有一些问题:
- 接收的数据可能并不完整:
一旦接收到了字节,CPU就会处理中断函数。若是此时数据还没有被完整接收,就会使处理出现问题;
- 中断触发源有多种:
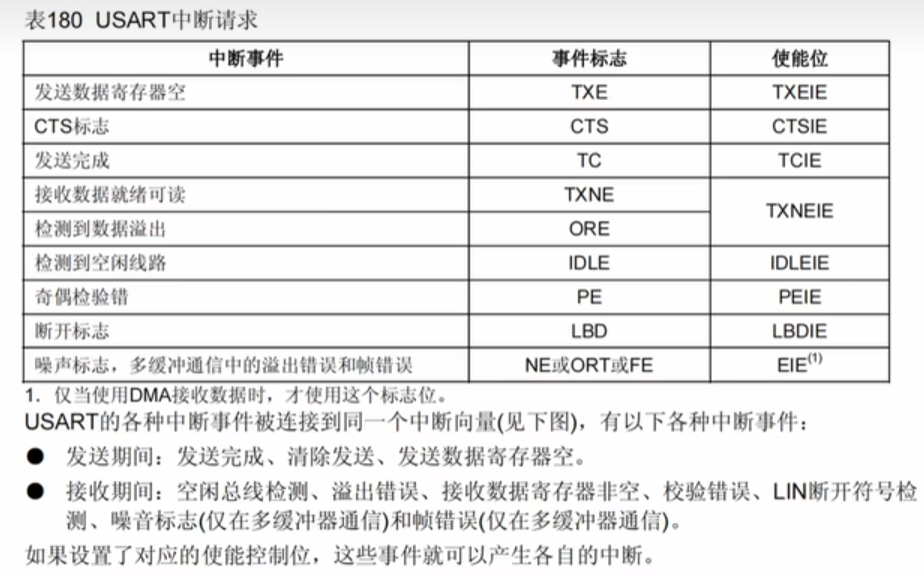
可以看到,有多种事件均能触发该中断函数。
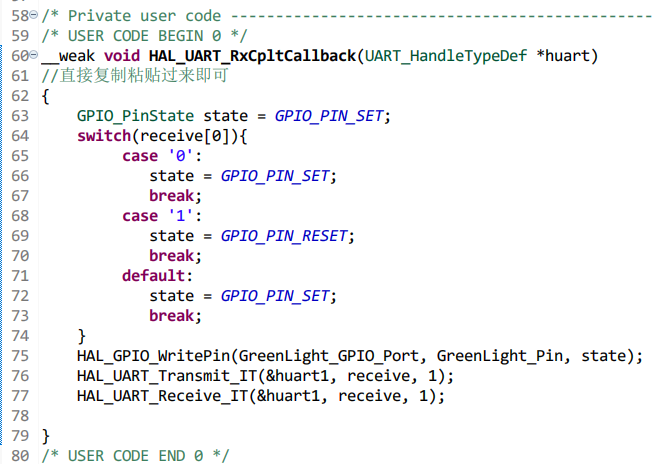
总之,我们需要确定产生中断的原因,并根据这个原因来触发我们控制绿灯亮灭的代码。在我们的实例中,这个原因应该是中断事件中的“接收数据就绪可读”。当STM32触发了这个事件,就会调用具体的函数来处理这个事件。在STM32中,对应的函数是一个回调函数:HAL_UART_RxCpltCallback。
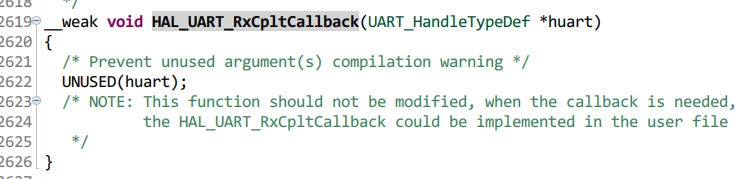
STMCubeIDE自动生成的回调函数,位于stm32f1xx_hal_uart.c
回调函数
回调函数简单来说就是将函数作为参数来调用。还记得c语言中的qsort函数吗?这个函数接收一个自定义的比较函数作为其参数之一。我们把这个自定义函数称为“回调函数”。
函数 F1 调用函数 F2 的时候,函数 F1 通过参数给 函数 F2 传递了另外一个函数 F3 的指针,在函数 F2 执行的过程中,函数F2 调用了函数 F3,这个动作就叫做回调(Callback)。
奇怪的是,为什么我们要使用回调函数呢?
还记得吗?你曾经写过用qsort来排序字符串二维数组和结构体的程序!
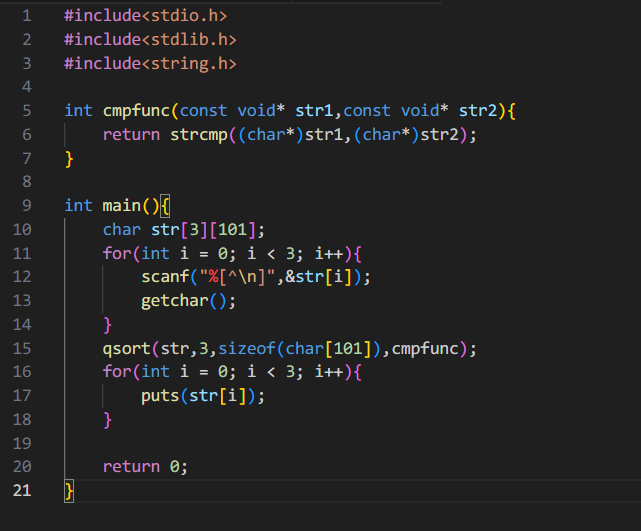
用qsort来排序一个二维数组
开发者不可能在.h库文件中将所有比较方法都列举一遍。如果使用回调函数,就能允许用户或其它开发者自定义地调用函数,大大提高了函数的灵活性和可用性。我们把使用回调函数得到的好处称为“解耦”。
函数最开始的"__weak"代表了弱定义,也就是说,我们可以在程序的其它位置重新定义这个函数。只要接收完成,该函数就会被触发,接着NVIC触发中断,CPU转而执行函数内的内容。
现在我们可以构建一个新的程序的模型:
在程序开始就接收数据;
接收数据完成,触发HAL_UART_RxCpltCallback()函数,在该函数内部执行绿灯亮灭操作;
while循环内控制红灯亮灭。
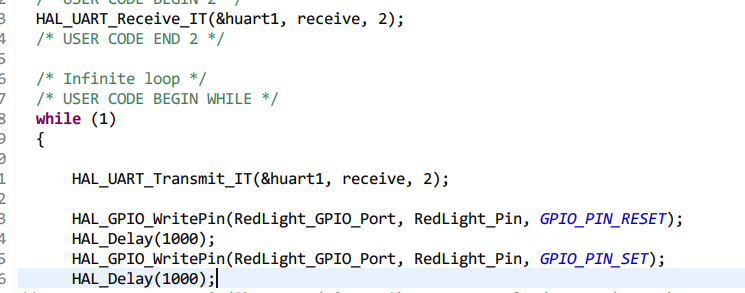
进入main.c文件,编写代码。
每次回调函数结束后都会再次执行接收函数,保证一直能够读入数据
刷板运行一下:
成功运行!
三、串口DMA模式
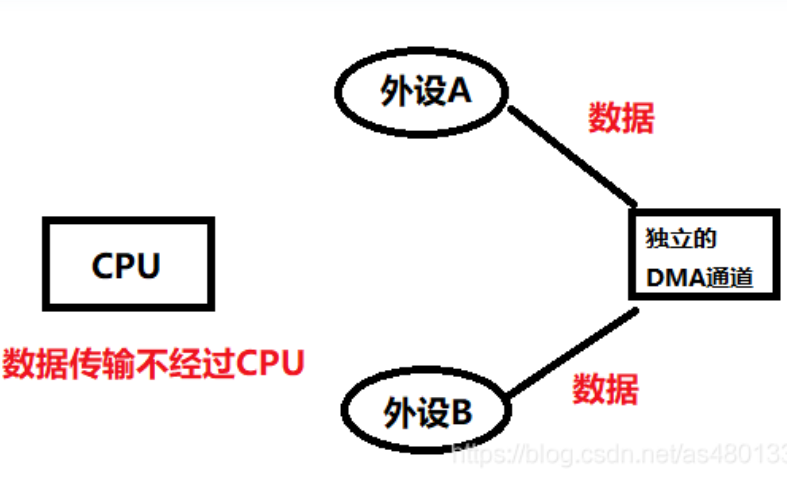
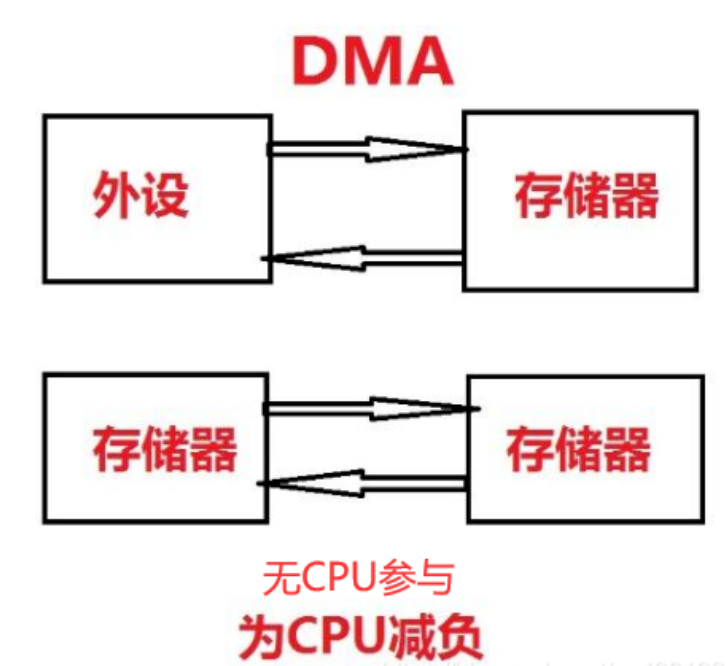
无论是轮询和中断模式,我们总是看到CPU在勤勤恳恳地执行任务,在接收数据和正常任务之间来回辗转。有没有一种办法可以让信道之间的信息传输绕开CPU处理,从而减轻CPU的负担呢?还真有,那就是DMA,Direct Memory Access,直接内存读取技术。
进行DMA传输,需要四个关键参数:
- 数据的源地址
- 数据的目标地址
- 数据传输量
- 传输模式(正常(一次)or循环)
有了这几个参数,我们只需要在两个设备之间建立一条(双向就要两条)DMA通道。当信息传输完成时就触发DMA中断回调函数,接着就执行该中断函数中的代码。这样一来,CPU的工作量就被大大减少了。

要建立DMA通道,在ioc文件中的DMA选项卡(属于System Core)中点击Add新增一条,CubeMX会自动帮我们填写参数并建立DMA通道。也可以在USART(属于Connectivity)配置中新增。
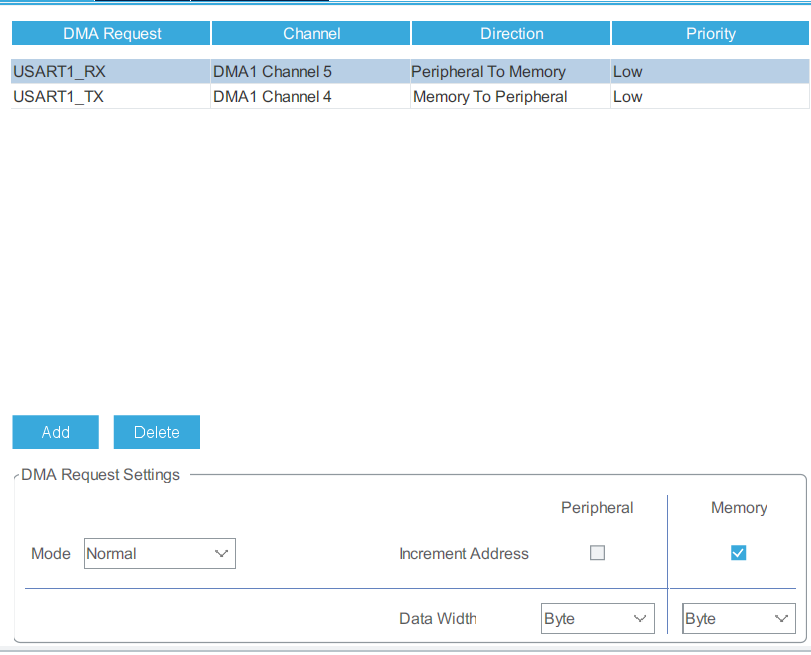
新建RX和TX的DMA通道
使用DMA传输,仍然会触发中断。因此我们只需要将原来的收发函数改写成_DMA后缀即可。
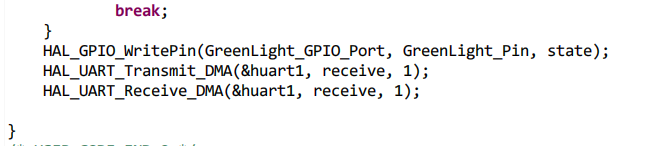
刷板运行,和之前效果一致。