一、按键输入
和上次一样,我们还是先从原理图上找到按键对应的引脚。
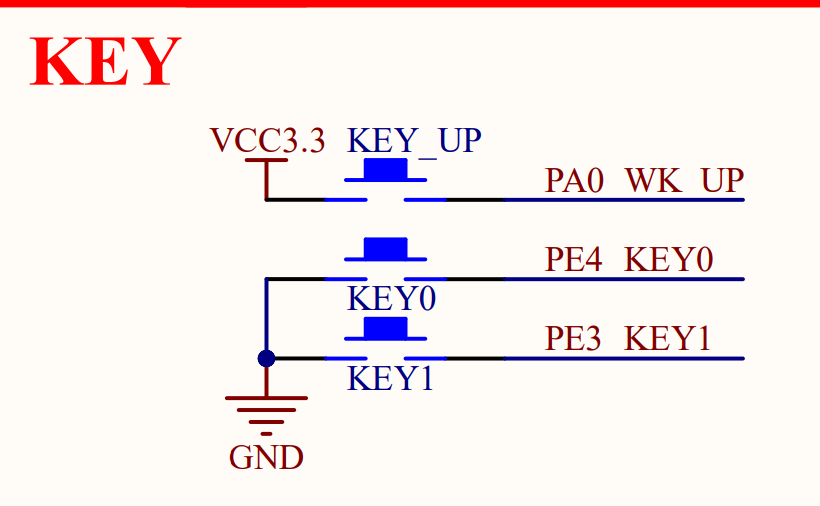
1、浮空输入模式
先从KEY_UP开始。我们只需要设定PA0为“浮空输入模式”,就能让引脚内部处于高电阻态。当我们按下按钮,此时电路连通,在PA0处几乎没有多少压降,读取到的电压也就是3.3V的高电平;松开按钮,PA0就又会回到0V。我们只需要用函数来读取这个地方的电平即可进行更多操作。
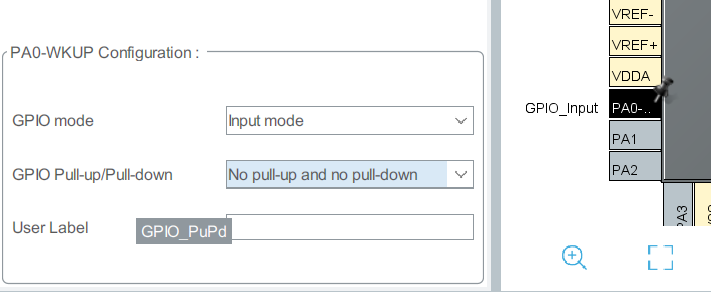
浮空输入模式
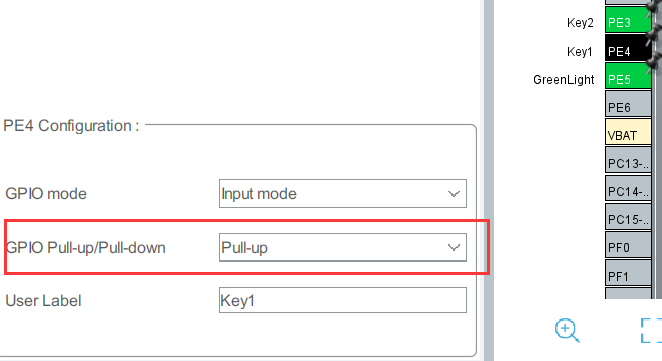
2、上拉/下拉输入
接下来看到KEY0和KEY1。对于这两枚按键,我们明显不能只使用浮空输入模式。这个时候就需要用到“上拉/下拉输入”模式。
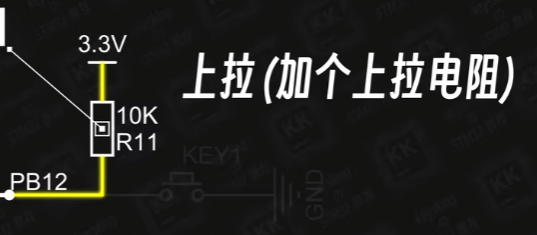
我们在原本的电路上加一个上拉电阻和一个VDD输入。当按键松开,PB12处为3.3V(芯片内部高阻态);当按键按下,PB12处为0V,这样就达到了我们的目的。
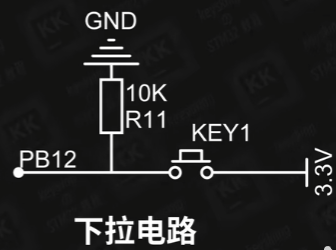
有上拉,也就有下拉,原理相同,效果相反
然而我们的原理图上并没有什么上拉和下拉电阻,因此我们就需要用到程序自带的上/下拉电阻。
效果和刚才的电路图一致
至于为什么能做到和外加上拉电阻一样的效果,我们会在本章的结尾解释。
二、控制小灯
在这部分,我们使用Key1和2来对红色和绿色小灯进行控制。
我们的目标是:按下Key1翻转红色小灯亮灭;按住Key2绿色小灯亮起,松开Key2绿色小灯熄灭。
1、翻转亮灭
根据前文所述,我们首先需要用函数读取PE4和PE3的电平状态。于是我们使用HAL_GPIO_ReadPin函数。

两个参数分别对应引脚组和引脚,返回值是高/低电平
对于翻转亮灭来说,我们可以用if…else…来分别给PB5引脚赋值高电平或低电平。不过我们有更方便的函数来直接翻转特定引脚的电平。


当读取到Key2(PE3)低电平时,翻转红色小灯引脚电平
将这一语句放进while循环中,并刷入学习板。
我们发现小灯的亮灭似乎不怎么受控制。实际上,在按键按下和松开的时候,由于人手指和电路板的抖动,引脚PE4电路的状态并不是完全闭合,而是在闭合和断路之间不断切换。这时芯片程序便会反复进入if语句并且触发HAL_GPIO_TogglePin函数,最终结果的体现就是小灯的亮灭不受控制。
我们可以使用软件消抖来解决这个问题。
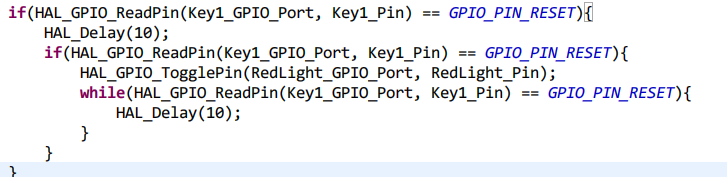
在读取到按下Key1后,首先延时10ms,这时再读取到的电平就应该是稳定的电平。
接下来翻转亮灭,并且开始死等,直到读取到稳定的Key1松开的电平(SET),再结束这个if语句。这样就避免了多次进入if语句并触发TogglePin函数。
稳定的翻转控制
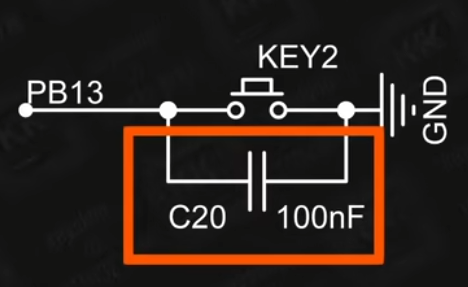
实际上,除了上述的软件消抖策略外也有硬件消抖的策略。下图是一种硬件消抖的实现:
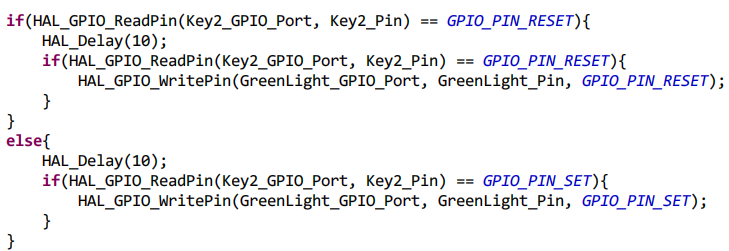
2、按住按键
这部分的逻辑也很简单。检测到Key2按下,就将PE5写成低电平;检测到Key2松开,就将PE5写成高电平。结合刚才提到的软件消抖,我们可以写出这样的代码并且成功编译刷板运行。
三、GPIO八大模式详解